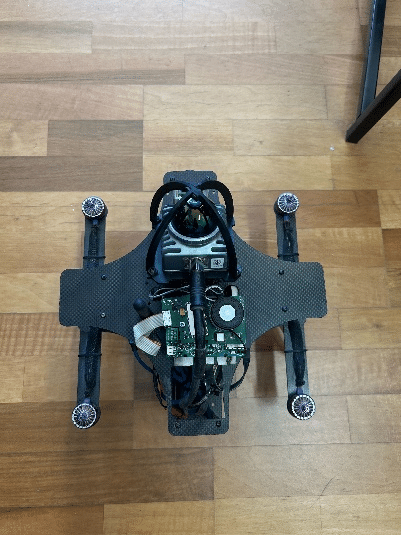



We introduce an innovative solution that integrates multiple diverse technologies towards a common goal, that is to improve disaster response, through increasing situational awareness. Imagine a confined indoor space which we need to regularly inspect for possible dangers, such as gas concentrations, before entering the site. The site could be in danger due to an unfortunate man-made or environmental event. A control team is located in the entrance of the site. Our proposed approach embeds advanced IoT sensing and connectivity capabilities to unmanned surface or aerial vehicles (UxVs). These UxVs fly autonomously in the space and leveraging the embedded IoT technologies scan the area and report the findings into the control team. After analysing the results, the team can decide the optimal recover measures.

Assuming an unmanned vehicle, e.g. a UAV, from a 3rd party provider, the proposed modular IoT solution includes the following hardware & software elements:
On the hardware side:
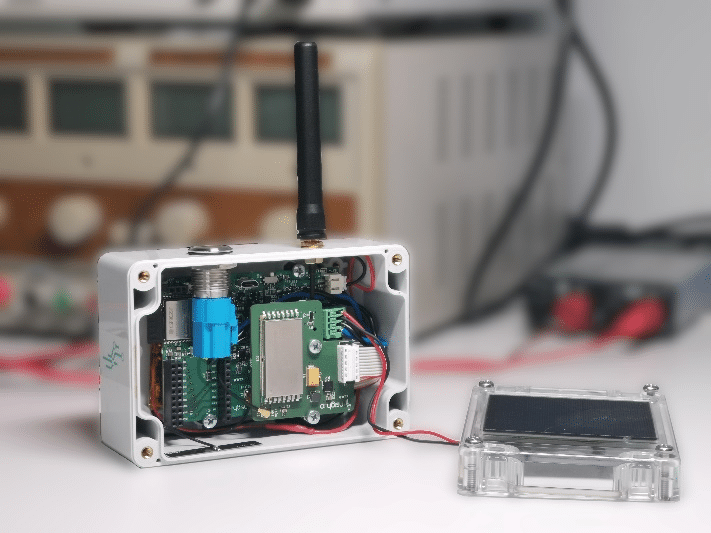
- A compact and modular IoT hardware unit that is onboarded on the UAV, and has expansion ports to enable sensing and remote control capabilities in the indoor site.
- Another identical hardware unit that interfaces with a standard computing platform (e.g. a laptop) for implementing gateway/control functionalities from a safe distance.
On the software side:
- Embedded software (firmware) that runs on the IoT hardware units and takes care of low-level communication with the sensors and the radio module.
- Software that runs on the external computing platform and implements high-level gateway functionalities through a user interface, i.e. monitoring the sensor readings and the UAV flight status as well as sending commands to the latter.


On the software side, there has been custom development of the IoT node firmware for both the UAV and the Gateways nodes along with the design and implementation of the custom UI running in the Gateway.
- The IoT node firmware runs on MicroPython 1.22 and its implementation has been based on the communication scenarios and modem drivers offered by Wei1234c/SX127x_driver_for_MicroPython_on_ESP8266 open-source project, combined with the libraries of insigh.io node open-source project. The node on the UAV, listens to ROS (Robotic Operating System) topics through UART, aggregates data and every 1.5s it generates a 14-byte message with all the required information. The message includes the following information: UAV battery voltage, mean/deviation of latency, 3D position coordinates, as well as insigh.io node Oxygen, CO2, Temperature, Humidity. The message flight time is ~700ms so this gives the opportunity window of 800ms to listen back for commands sent by the Control Gateway. The radio node on the Gateway, decodes messages on reception and sends the data through UART to the computing node (e.g. a laptop) in human readable form, ready to be consumed by the UI. When a command is requested from the Gateway, it is encoded to 1-byte message and is sent back to the UAV for action.
- The Control Gateway UI is a Python application backed by Qt libraries for GUI development (PyQt) and has been tested on Windows and Ubuntu. It offers 5 predefined Control Commands for the UAV, visualizations of the UAV status and finally a clear view of the important sensor measurements. This full bundle of features gives to the operator of the system a clear understanding of the UAV’s environment and a quick access to critical control commands for the UAV operation.